























美探索下一代水下潛航器新設計
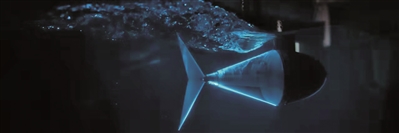
研究人員仿照金槍魚外形研制出機器魚,其尾部加裝人工肌腱,可調節擺動速度
據外媒報道,美科學家根據魚類在游動中展示的生物力學和流體力學特征,結合機器人技術,開發智能機器魚尾,以期用於下一代水下潛航器的設計。
據報道,8月出版的《科學機器人》雜志,刊登了美國弗吉尼亞大學研究人員關於水下潛航器變速航行的研究成果。這篇文章稱,通過觀察魚類游動不難發現,大部分魚類為保持水下游動的靈活性,會根據自身與外部情況隨時調整方向、速度和深度,這些調整主要依靠魚身“推進器”——魚尾完成。由於現有科學方法無法測量魚在游動過程中尾部變化情況,因此很難准確掌握魚是如何做到這一點的。研究人員通過構建仿真模型,解析不同情況下魚尾如何影響魚的游動,並在此基礎上得出結論。簡單來說,魚尾的肌肉張力與航速的平方成正比。為進一步驗証該結論,研究人員仿照金槍魚外形制造出一條機器魚,在其尾部加裝由程序控制的人工肌腱,以調節尾部的擺動情況。在高速、不規則、非對稱水流條件下,進行兩種游動測試。一種是調節尾部擺動進行游動,另一種是固定尾部進行游動。測試結果顯示,在前一種情況下,機器魚的游動速度更快,能量消耗更少。由此表明,推進器可調節技術將對水下潛航效率帶來改變。
在設計下一代水下潛航器時,難題在於如何實現對推進器的智能調節。因為水下環境並非既定不變,在某些環境下工作良好的推進器,在另一種環境下可能嚴重效率不足。
報道稱,此項研究首次將生物力學、流體力學和智能機器人技術結合起來,綜合研究推進器擺動對水下航行的影響,有助於解答推進器擺動如何影響航行效率。此項研究不僅進行了理論分析,還提出可行的解決方案,實現水下航行的高速與高效。研究人員希望在此基礎上,探索和完善水下潛航器變速航行的關鍵技術,仿海豚或蝌蚪等研制智能水下潛航器,並用於下一代水下潛航系統的設計制造。
目前,為保障航行效率,水下潛航器通常被設計為按某一固定速度航行,無法像魚類般“游動自如”,使得水下潛航器難以完全滿足現實需求。這項研究成果帶來的技術突破,或可為上述需求提供新的解決方法。(成高帥、任科學)
分享讓更多人看到 
人民日報社概況 | 關於人民網 | 報社招聘 | 招聘英才 | 廣告服務 | 合作加盟 | 供稿服務 | 數據服務 | 網站聲明 | 網站律師 | 信息保護 | 聯系我們
服務郵箱:kf@people.cn 違法和不良信息舉報電話:010-65363263 舉報郵箱:jubao@people.cn
互聯網新聞信息服務許可証10120170001 | 增值電信業務經營許可証B1-20060139
廣播電視節目制作經營許可証(廣媒)字第172號 | 互聯網藥品信息服務資格証書(京)-非經營性-2016-0098
信息網絡傳播視聽節目許可証0104065 | 網絡文化經營許可証 京網文[2020]5494-1075號 | 網絡出版服務許可証(京)字121號 | 京ICP証000006號 | 京公網安備11000002000008號
人 民 網 版 權 所 有 ,未 經 書 面 授 權 禁 止 使 用
Copyright © 1997-2021 by www.people.com.cn. all rights reserved



-
評論

-
關注
微信微博快手
 第一時間為您推送權威資訊
第一時間為您推送權威資訊
 報道全球 傳播中國
報道全球 傳播中國
 關注人民網,傳播正能量
關注人民網,傳播正能量
